
Sensores y sistemas de medición 2014; 17. Simposio ITG / GMA: un nuevo sensor para la medición de viscosidad y densidad de fluidos para aplicaciones de perforación de pozos de petróleo
General
Se publicó un documento de conferencia y se pronunció una charla en Sensors and Measuring Systems 2014; 17. Simposio ITG / GMA, titulado “Un nuevo sensor para la medición de viscosidad y densidad de fluidos para aplicaciones de perforación de pozos de petróleo” en junio de 2014.
Cubre algunos de los trabajos de I+D realizados por Rheonics (anteriormente Viscoteers) en colaboración con Baker Hughes para desarrollar un sensor de densidad y viscosidad que mida las propiedades del fluido de formación con alta precisión y resolución.
Resumen
Este artículo describe un nuevo sensor de densidad y viscosidad que mide las propiedades de los fluidos de formación con alta precisión y resolución. La viscosidad dinámica (ri) en combinación con otros parámetros del fluido como la densidad (p), la velocidad del sonido, el índice de refracción, los espectros de absorción y la conductividad térmica proporcionan una caracterización integral del fluido de la muestra. La estimación de la permeabilidad de la formación es crítica para predecir el potencial de producción del yacimiento. Las mediciones de movilidad realizadas en la formación utilizando diversas herramientas de muestreo de fondo de pozo pueden usarse para calcular la permeabilidad de la formación cuando se conoce la viscosidad precisa in situ de los fluidos de la formación.
El fluido de muestra puede ser cualquier combinación de varios hidrocarburos de peso molecular, salmuera, filtrado de lodo a base de aceite o agua y gases. y los fluidos típicamente tienen una viscosidad en el rango de 0.5 a 4 cP (mPa.s) pero pueden ser tan altos como 40 cP en aceites pesados. La densidad del fluido puede variar de 0.2 a 1.5 g / cc. Además, los fluidos también pueden ser conductores y pueden tener propiedades parcialmente no newtonianas.
Para que un sensor sea utilizable en una muestra de formación de fondo de pozo y herramienta de análisis, por lo tanto, debe tener un amplio rango dinámico con una precisión superior al 10% de la lectura. También debe ser capaz de medir a temperaturas de hasta 175 ° C y presiones superiores a 25 kpsi.
En este documento, se describe un nuevo sensor que puede cumplir con todos estos requisitos. Es un resonador mecánico accionado cuya frecuencia resonante y amortiguación producen valores precisos para la viscosidad y densidad de un fluido en el que está sumergido. El sensor fue diseñado para ser altamente preciso y suficientemente robusto para soportar la temperatura, la presión y las vibraciones de perforación que se encuentran en el registro de fondo de pozo. La viscosidad se mide dentro de 0.1 cP para fluidos de menos de 1 cP y 10% para todas las viscosidades superiores a 1 cP. Las mediciones de densidad son precisas a mejores de 0.01 g / cc. El sensor se puede usar tanto para herramientas de línea fija como para herramientas de tala mientras se perfora (LWD).
El documento presenta los principios de medición del sensor y las pruebas de calificación de alta temperatura y alta presión. Las medidas de laboratorio de viscosidad y densidad de fluidos realizadas con el nuevo sensor se muestran para una variedad de fluidos de calibración que son típicos de fluidos de fondo de pozo recolectados por herramientas de muestreo de formación.
1. Introducción
Se han implementado varios sensores para la medición in situ de la viscosidad y la densidad para los servicios de evaluación de formación de cable y LWD. En 2008, Baker Hughes introdujo un diapasón piezoeléctrico [6] que mide la densidad del fluido en el rango de 0.01 a 1.5 g / cc con un RMSE
± 0.015 g / cc para viscosidades inferiores a 30cP; y RMSE ± 0.03 g / cc para viscosidades entre 30cP y 200cP. El rango de medición de viscosidad para este sensor es de 0.2 a 30 cP con un RMSE ± 0.1 cP o 10% (lo que sea mayor) y entre 30 y 200 cP con un RMSE ± 20%.
Este sensor se desarrolló inicialmente para aplicaciones con cable, pero en 2010 se adaptó para herramientas LWD. Al mismo tiempo, Baker Hughes, en cooperación con Viscoteers Inc., comenzó a desarrollar una nueva tecnología de sensores diseñada para el entorno de perforación altamente exigente, cumpliendo y superando las capacidades de medición de su predecesor.
2. Descripción del sensor
El nuevo sensor es un resonador torsional de alta precisión [3] que cambia sus características - frecuencia de resonancia y amortiguación - dependiendo de la densidad y viscosidad del fluido en el que está sumergido el sensor. ( ).
El resonador se excita y se detecta de forma inalámbrica mediante un acoplamiento magnético entre las bobinas eléctricas fuera de la cámara de detección y los imanes incrustados en las cabezas de los dientes del resonador [3] ( ) El resonador está hecho de metal de alta resistencia, altamente resistente a la corrosión y bien caracterizado, cuyas propiedades permanecen estables a alta temperatura y alta presión ambiental. Esta configuración evita los conductos eléctricos al lado del fluido a alta presión, que son una fuente notoria de falla en los sensores que requieren conexiones eléctricas a través de la barrera de presión. Debido a que el resonador está hecho completamente de metal, el sensor es extremadamente robusto y adecuado para entornos hostiles en condiciones de perforación de fondo de pozo.
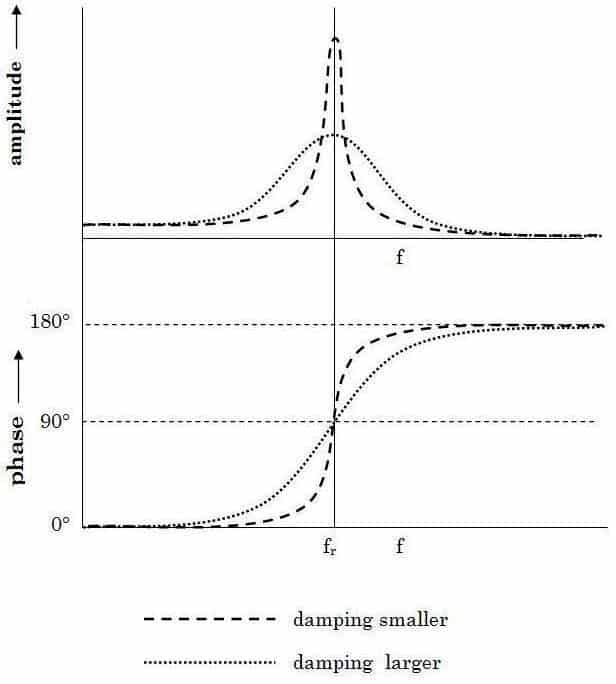
Fig 1. Curvas de respuesta de resonancia de amplitud y fase frecuencia de resonancia arrogante del sensor inmerso en dos fluidos con amortiguación diferente. Gráfico de Good-bread et al, 20013.
El resonador se excita y se detecta de forma inalámbrica mediante un acoplamiento magnético entre las bobinas eléctricas fuera de la cámara de detección y los imanes incrustados en las cabezas de los dientes del resonador [3] ( ) El resonador está hecho de metal de alta resistencia, altamente resistente a la corrosión y bien caracterizado, cuyas propiedades permanecen estables a alta temperatura y alta presión ambiental. Esta configuración evita los conductos eléctricos al lado del fluido a alta presión, que son una fuente notoria de falla en los sensores que requieren conexiones eléctricas a través de la barrera de presión. Debido a que el resonador está hecho completamente de metal, el sensor es extremadamente robusto y adecuado para entornos hostiles en condiciones de perforación de fondo de pozo.
El oscilador mecánico tiene un alto factor Q, que es un requisito previo para un amplio rango dinámico de las mediciones de amortiguación.
Los dos valores medidos por el sensor, la frecuencia de resonancia y la amortiguación, se correlacionan con los valores de viscosidad y densidad mediante un modelo matemático tan rápido como mediante una curva de calibración empírica construida para cada sensor. Ambos métodos proporcionan resultados extremadamente precisos y repetibles (consulte la especificación del sensor), pero debido a que el método de calibración empírica es menos costoso desde el punto de vista computacional y es menos susceptible a variaciones en la forma del sensor, es el método preferido.
El resonador es excitado por bobinas impulsadas por una corriente alterna que varía en frecuencia según lo requiera la medición. La respuesta del sensor es detectada por bobinados adicionales en las bobinas. La medición completa de la viscosidad y la densidad toma aproximadamente 1 segundo, lo cual es una mejora significativa con respecto a las tecnologías anteriores, ya que se puede realizar mientras la presión es constante en el período de extracción de la bomba.
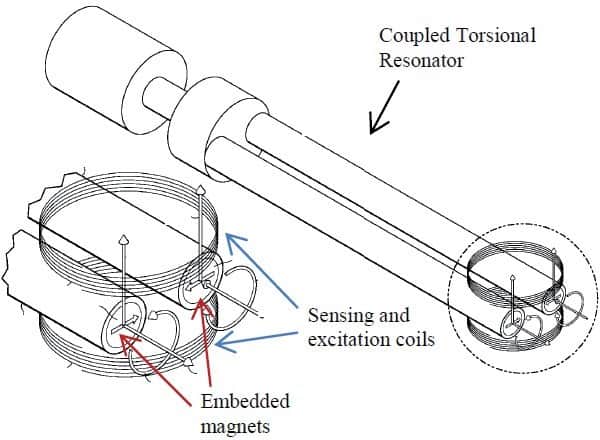
. Sensor de viscosidad-densidad acoplado al concepto de resonador torsional. Gráfico de Goodbread et al, 20013.
El sensor (Fig. 3) no solo soporta presiones y temperaturas extremadamente altas (probado en laboratorio a 2000 bar y 200 ° C), sino que también es inmune al daño por golpes de hasta 750 gy vibraciones continuas a 30 g.
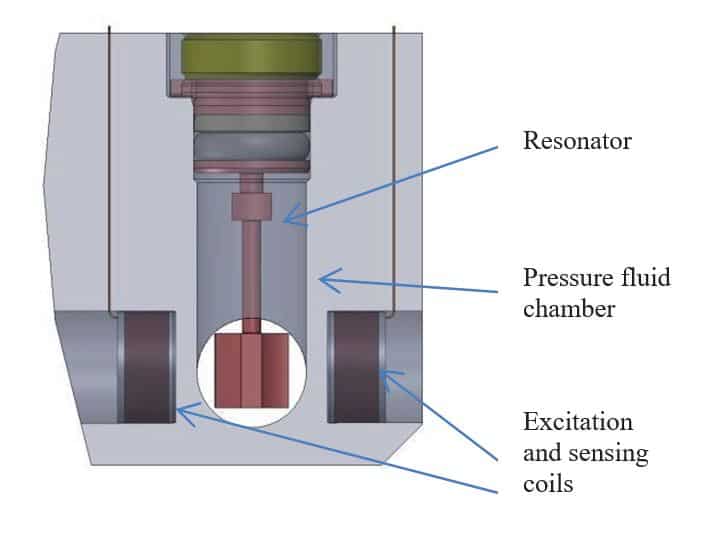
. Diseño del módulo sensor de viscosidad-densidad
El sensor está controlado por un bucle de fase bloqueada que rastrea y monitorea su frecuencia de resonancia para medir la densidad del fluido. Al cambiar periódicamente la relación de fase entre la excitación y la respuesta del sensor, la amortiguación del resonador, a partir de la cual se puede estimar la viscosidad, puede determinarse como se muestra en Fig 4.
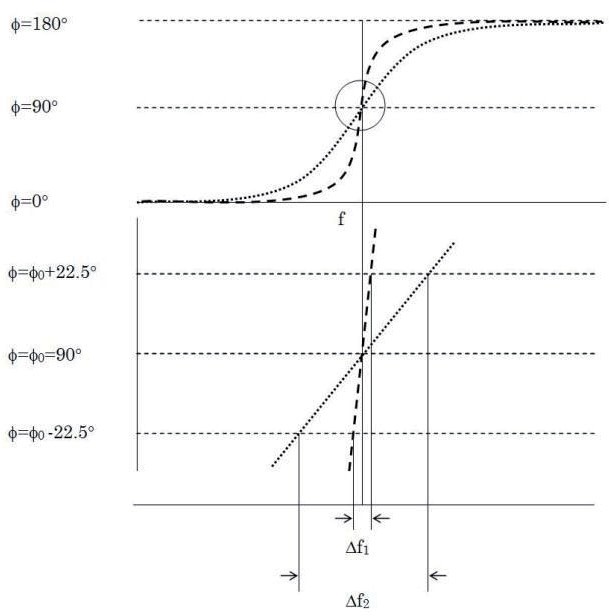
. Método de cambio de fase para calcular la amortiguación de un fluido. Gráfico de Goodbread et al, 20013.
3. Especificaciones del sensor
Las especificaciones fueron verificadas contra las propiedades probadas de los sensores fabricados. El sensor es capaz de medir fluidos de muestra de cualquier combinación de varios hidrocarburos de peso molecular, salmuera, filtrado de lodo a base de aceite o agua y gases.
El enorme rango dinámico del sensor se puede apreciar comparando sus especificaciones con las de los sistemas estándar de medición de viscosidad y densidad de fluidos industriales.
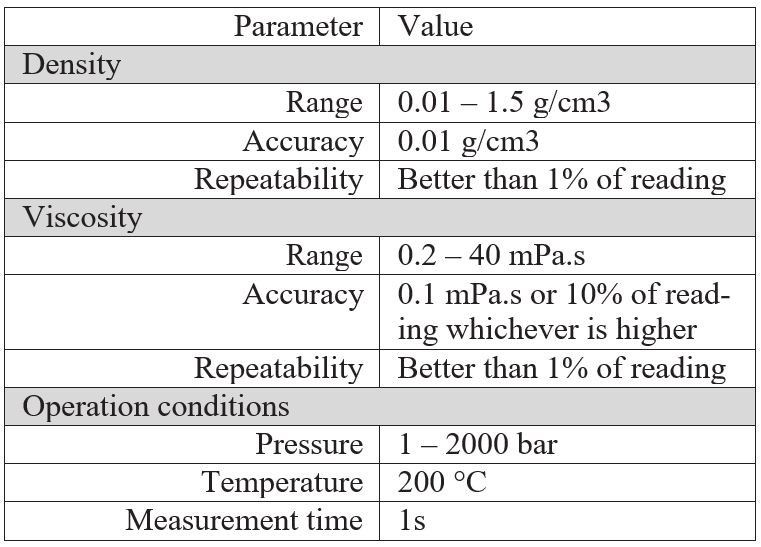
Tabla 1. Especificaciones del sensor de viscosidad y densidad
4. Pruebas de sensores en condiciones de laboratorio.
El sensor se probó a varias presiones y temperaturas con varios fluidos seleccionados para cubrir el rango de viscosidad y densidad de los fluidos encontrados en el fondo del pozo.
Los resultados de la prueba verifican la exactitud y precisión de la medición en el rango requerido de fluidos. Los fluidos utilizados fueron:
- Salmuera con una concentración de 2 mol de NaCl por litro de agua,
- N-dodecano
- Aceite estándar de viscosidad Cannon® S-20, N-2, N- 10, N-35, N-75, S-6.
Se eligieron estos fluidos porque:
- Están disponibles valores de referencia precisos para sus propiedades.
- su rango de viscosidad y densidad abarca el rango del sensor
- sus propiedades físicas proporcionan una muestra representativa de los fluidos que se encuentran en el fondo del pozo (es decir, base de agua y aceite, fluidos conductores y no conductivos)
muestra el rango de medición de densidad y la precisión lograda con el sensor para diferentes fluidos.
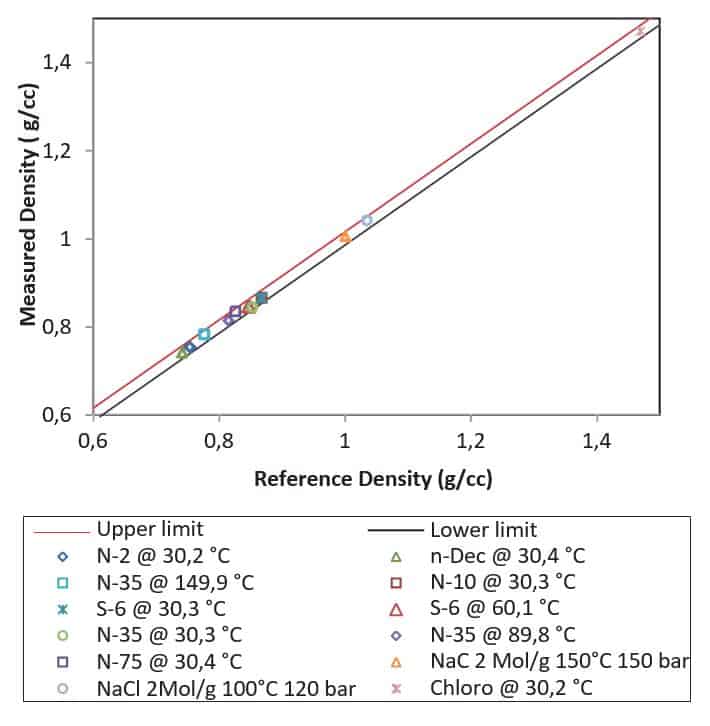
. Densidad medida de salmuera (2 mol / l), N-dodecano, Cañón S-6, N-2, N-10, N-3, N-75 y cloroformo. Las líneas negras y rojas continuas representan los valores máximos y mínimos permitidos prescritos por las especificaciones del sensor.
y 7 muestra el rango de medición de la viscosidad y la precisión lograda con el sensor para diferentes fluidos que cubren la mayor parte del rango de las especificaciones.
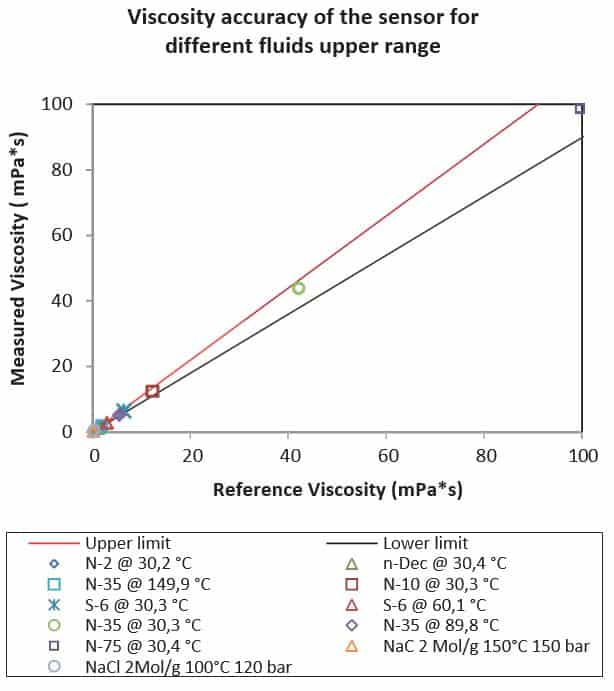
. Viscosidad medida en el rango superior de salmuera (2 mol / l), N-dodecano, Cañón S-6, N-2, N-10, N-35 y N-75. Las líneas negras y rojas continuas representan los valores máximos y mínimos permitidos prescritos por las especificaciones del sensor.
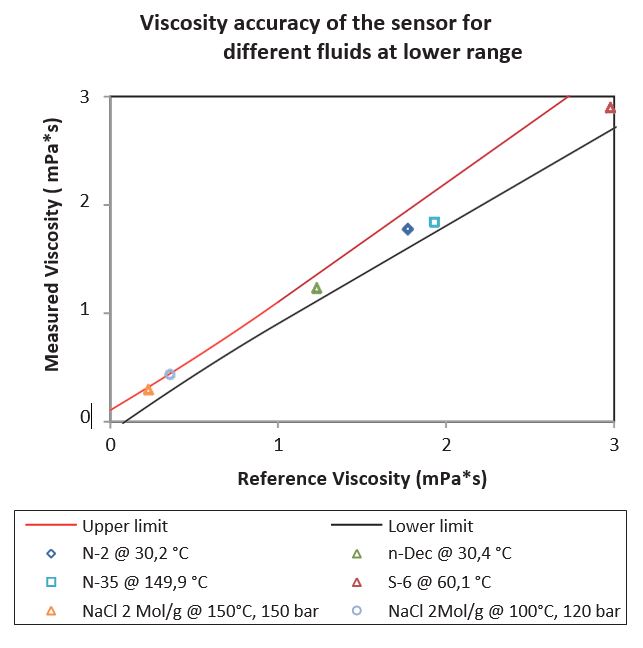
Higo. 7. Viscosidad medida en el rango inferior de salmuera (2 mol / l), N-dodecano, Cañón S-6, N-2, N-10, N-35 y N-75. Las líneas negras y rojas continuas representan los valores máximos y mínimos permitidos prescritos por las especificaciones del sensor.
4.1 Detalles de precisión y precisión de las mediciones con N-dodecano
Se seleccionó N-dodecano para pruebas detalladas debido a la disponibilidad de la disponibilidad de referencia precisa hasta altas presiones (1900 bar) y altas temperaturas (200 ° C).
y 9 muestra el comportamiento de medición de la viscosidad con respecto a los cambios en la presión (1 a 1500 bar). Los valores siguen la viscosidad de referencia con un error inferior al 5% de las lecturas. En cada condición de presión-temperatura, se toman 50 puntos de medición, ( ).
proporciona una visualización gráfica del error absoluto (distancia desde la línea 0) y la precisión (variación de la nube de puntos para cada medición de temperatura-presión), que es mejor que 0.5% de la lectura.
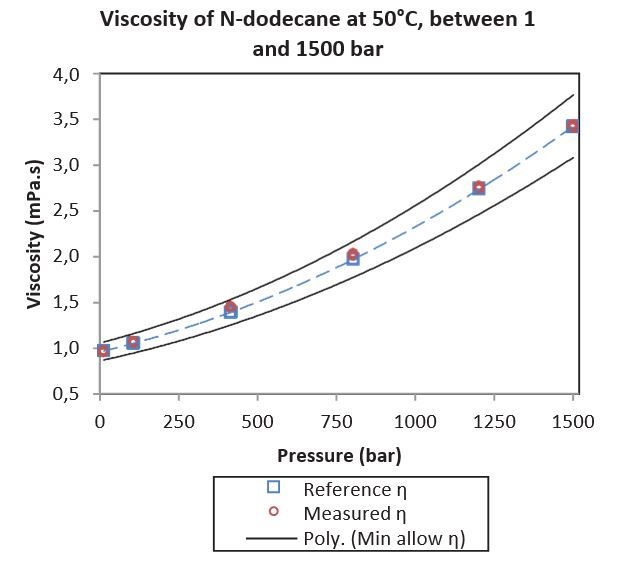
Higo. 8. Viscosidad de N-dodecano a 50 ° C entre 1 y 1,500 bar. Valores de referencia de Caudwell et al, 2008.
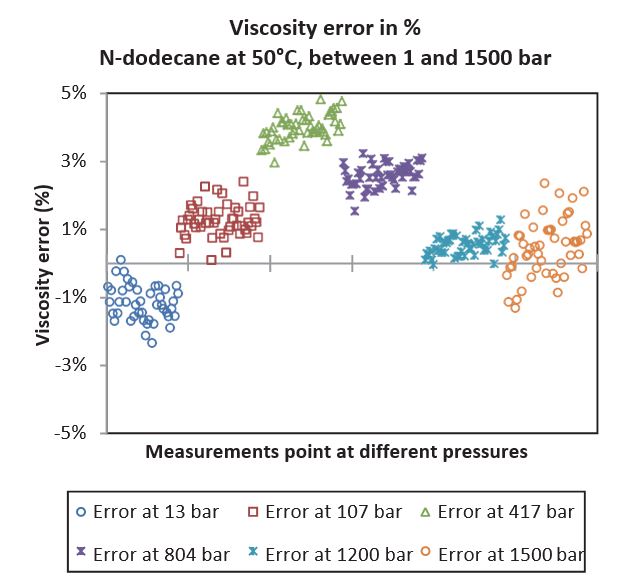
Fig. 9. Errores medidos en viscosidad de N-dodecano (con respecto a la referencia) a 50 ° C, entre 1 y 1,500 bar. Valores de referencia de Caudwell et al, 2008.
y 11 muestra el comportamiento de medición de densidad con respecto a los cambios en la presión (1 a 1,500 bar). La densidad medida comprende una precisión mejor que +/- 0.003 g / cc.
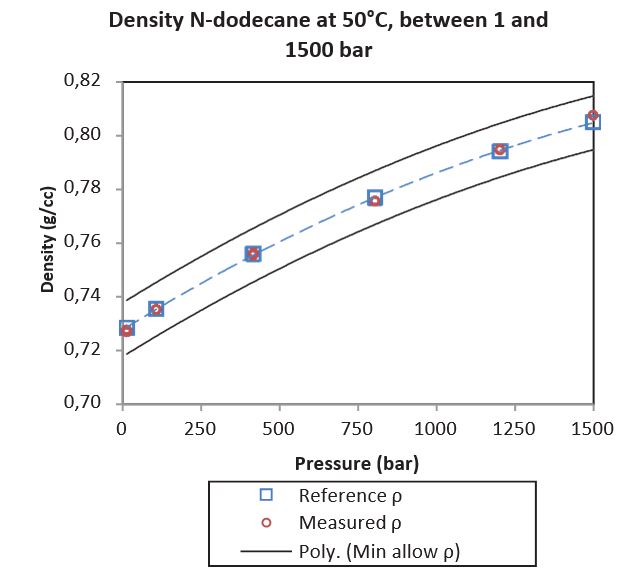
Higo. 10. Densidad de N-dodecano a 50 ° C entre 1 y 1,500 bar. Valores de referencia de Caudwell et al, 2008.
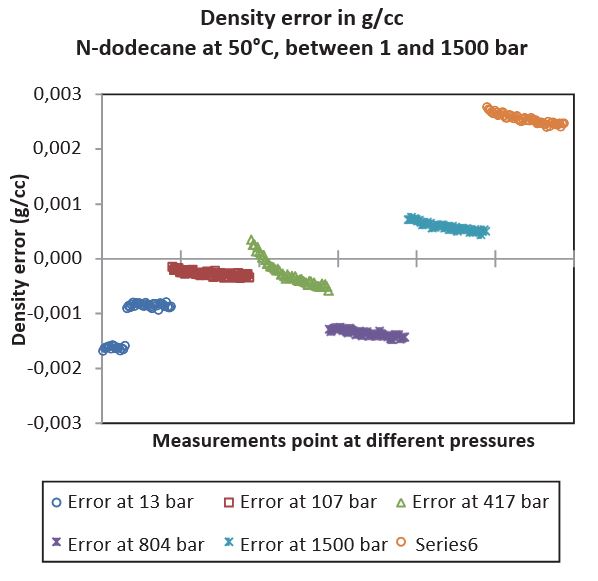
Higo. 11. Errores medidos en la densidad de N-dodecano (con respecto a la referencia) a 50 ° C, entre 1 y 1,500 bar. Valores de referencia de Caudwell et al, 2008.
La precisión mínima calculada de los dos últimos gráficos es mejor que el 0.1% de la lectura.
5. Conclusiones
El nuevo sensor de densidad y viscosidad, diseñado para el exigente entorno de LWD, funcionó mejor que las especificaciones objetivo durante las pruebas de laboratorio. El resultado obtenido para los tres fluidos presentados en este documento verifica que:
- El sensor no muestra ningún sesgo de medición con cambios en la presión y
- La precisión del sensor para todos los fluidos presentados en el papel es mejor que +/- 0.001 g / cc para la densidad y mejor que +/- 1% para la viscosidad.
- La precisión de la densidad del sensor en todas las pruebas realizadas es mejor que 0.01 g / cc. La precisión de la viscosidad es mejor que el 10% de la lectura para viscosidades mayores a 1 mPa.s y mejor que 0.1 mPa.s para viscosidades menores a 1 mPa.s.
- El sensor no presenta ningún daño o cambio en el comportamiento de medición después de las pruebas de choque y vibración según las especificaciones.
- El sensor produce mediciones estables durante y después de todos los ciclos de temperatura y presión.
- No hubo evidencia de daño mecánico o por corrosión en el sensor después de todo el sensor después de todas las pruebas.
- El nuevo sensor es lo suficientemente robusto como para soportar las duras condiciones ambientales de los servicios de LWD y cableados, proporcionando viscosidades y densidades con la precisión y precisión necesarias para una herramienta de análisis de evaluación de formación de fondo de pozo.
- El sensor funciona bien en fluidos conductivos (salmuera) o no conductores, sin mostrar signos de influencia cuando se prueba en fluidos conductores.
6. referencias
- Caudwell Derek R., Trusler JP Martin, Vesovic Velisa, Wakeham William A., 2004, The Viscosity and Density of n-Dodecane and n-Octadecane at Presures hasta 200MPa and Temperatures up to 473 K., International Journal of Thermophysics 08 / 2004
- Galvan Sanchez Francisco, Baker Hughes, 2013, Muestreo mientras que la perforación va donde el cableado no puede: Estudios de casos que ilustran las mediciones de la calidad del cableado en entornos de pozo desafiantes, SPE-164293.
- Goodbread Joe, Juerg Dual, Viscoteers Inc, 2013, Viscosímetro de resonador torsional acoplado, EP2596328 A2.
- Kestin Joseph, Khalifa Ezzat H. y Correia Robert J., 1981, Tablas de la viscosidad dinámica y cinemática de soluciones acuosas de NaCl en el rango de temperatura 20-150 ° C y el rango de presión 1-35 MPa, Phys. Chem Árbitro. Datos, vol. 10, No.1 1981.
- Lundstrum Robbi, Goodwin Antony RH, Hsu Kai, Frels Michael, Caudwell Derek R., Trusler JP Martin y Marsh Kenneth N., 2005, Medición de viscosidad y densidad de dos fluidos de referencia, con viscosidad nominal a T = 298 K y p = 0.1 MPa de (16 y 29) mPa.s, a temperaturas entre (298 y 393) K y presiones inferiores a 55MPa, J. Chem. Ing. Datos 2005, 50, 1377-1388.
- Rocco DiFoggio, Arnold Walkow, Paul Bergren, Baker Hughes Inc, 2007, Método y aparato para la caracterización de fluidos de fondo de pozo utilizando resonadores mecánicos de flexión, Patentes de los Estados Unidos 7,162,918 B2.
- Rogers PSZ, y Pitzer Kenneth S., 1982, Propiedades volumétricas de soluciones acuosas de cloruro de sodio, J. Phys. Chem Árbitro. Datos, vol. 11, n. ° 1 1982.
Rheonics Soluciones para la industria del petróleo y el gas
Para explorar más sobre nuestras soluciones para la industria energética, visite la página de soluciones.

La capacidad de monitorear el nivel de arena en desarenadores, separadores y sistemas de flujo de retorno permite la automatización y una mayor eficiencia de los procesos de eliminación de arena y un mejor uso y vida útil de...

Para los ingenieros de procesos, es esencial desarrollar un método eficiente y confiable para monitorear y controlar la lechada de cal en la producción del producto objetivo. La clave…
El lodo es una mezcla de materiales líquidos y sólidos, que puede tener un comportamiento fluido o sólido dependiendo del porcentaje de los materiales que lo componen. Este término es…

A nivel mundial, el mercado de GNL se ha expandido a un ritmo significativo en la última década, y el GNL tiene beneficios ambientales considerables como combustible para el transporte. Los comerciantes comercializan GNL sobre la base...

El asfalto ha demostrado ser uno de los materiales más versátiles y eficaces para la pavimentación, ya sea de carreteras o de tejados. Asegurar que el asfalto cumpla con las normas regulatorias como ASTM,...

Los procesos en las refinerías donde las mediciones de viscosidad y densidad y la gestión juegan un papel central en las operaciones de refinería son los siguientes: Operaciones de mezcla precisas Movimiento de petróleo de refinería: Asegurar la calidad adecuada y…

Las emulsiones se utilizan en casi todos los aspectos de la vida diaria. Su procesamiento y desarrollo se expande a través de muchas industrias: productos químicos, recubrimientos, alimentos, cosméticos, adhesivos, fluidos industriales, productos farmacéuticos, aceite y ...

La ingeniería de sensores de registro de pozos en los collares de perforación está simulando una revolución en el registro y la perforación. LWD, MWD y los sistemas tradicionales de muestreo de fluidos con cable proporcionan al perforador un completo ...
{kind=link}

